









پر بازدیدترین مطالب
دانلود کتاب دینامیک گازها جیمز جان به همراه حل المسائل
دانلود کتاب دینامیک سیالات محاسباتی و کاربرد ها ، به نوشته اندرسون
دانلود فلوئنت و انسیس
سیزده نکته برای این که چگونه مثل یک حرفه ای مش بزنیم
دانلود کتاب ترمودینامیک کلاوس بورگناک و ریچارد سونتاگ ون وایلن
شبیه سازی مبدل های حرارتی (پوسته و لوله، مارپیچی، صفحه ای و ...) با CFD
دانلود آموزش شبیه سازی و تعیین نیرو های لیفت و درگ در جریان بر روی یک ایرفویل با مدل RAE 2822 با نرم افزار های فلوئنت و سی اف ایکس
دانلود آموزش شبیه سازی جریان سیالات در تونل باد بر روی یک خودرو با فلوئنت و سی اف ایکس
دانلود کتاب ترمودینامیک به نوشته سنجل (چنگل)
آموزش شبیه سازی شبیه سازی تاثیر جریان هوا بر ساختمان های بلند در فلوئنت و سی اف ایکس
محبوبترین مطالب
چگونه یک پروژه سیالاتی با نرم افزار انسیس فلوئنت انجام دهیم؟
طراحی حرارتی قطعات الکترونیکی به همراه هیت سینک (گرمابر) با استفاده از CFD
آنالیز هیدرودینامیک ، هیدرواستاتیک سازه های شناور با CFD و FEM
روش حجم محدود در دینامیک سیالات محاسباتی با اوپن فوم و متلب به صورت پیشرفته
دانلود کتاب مکانیک سیالات وایت
دانلود کتاب انتقال حرارت هولمن
دانلود کتاب ترمودینامیک کلاوس بورگناک و ریچارد سونتاگ ون وایلن
آموزش شبیه سازی و برسی نیروی شوک در جریان مافوق صوت و تراکم پذیر با نرم افزار های فلوئنت و سی اف ایکس [PDF]
دانلود کتاب دینامیک گازها جیمز جان به همراه حل المسائل
روش های محاسباتی برای دینامیک سیالات
پربحثترین مطالب
چگونه یک پروژه سیالاتی با نرم افزار انسیس فلوئنت انجام دهیم؟
طراحی حرارتی قطعات الکترونیکی به همراه هیت سینک (گرمابر) با استفاده از CFD
آنالیز هیدرودینامیک ، هیدرواستاتیک سازه های شناور با CFD و FEM
روش حجم محدود در دینامیک سیالات محاسباتی با اوپن فوم و متلب به صورت پیشرفته
دانلود کتاب مکانیک سیالات وایت
دانلود کتاب انتقال حرارت هولمن
دانلود کتاب ترمودینامیک کلاوس بورگناک و ریچارد سونتاگ ون وایلن
آموزش شبیه سازی و برسی نیروی شوک در جریان مافوق صوت و تراکم پذیر با نرم افزار های فلوئنت و سی اف ایکس [PDF]
دانلود کتاب دینامیک گازها جیمز جان به همراه حل المسائل
روش های محاسباتی برای دینامیک سیالات
تحلیل عددی تأثیر جانمایی هیدروپلنها بر حرکات دینامیکی زیردریایی در سه درجه آزادی
شرح مسئله
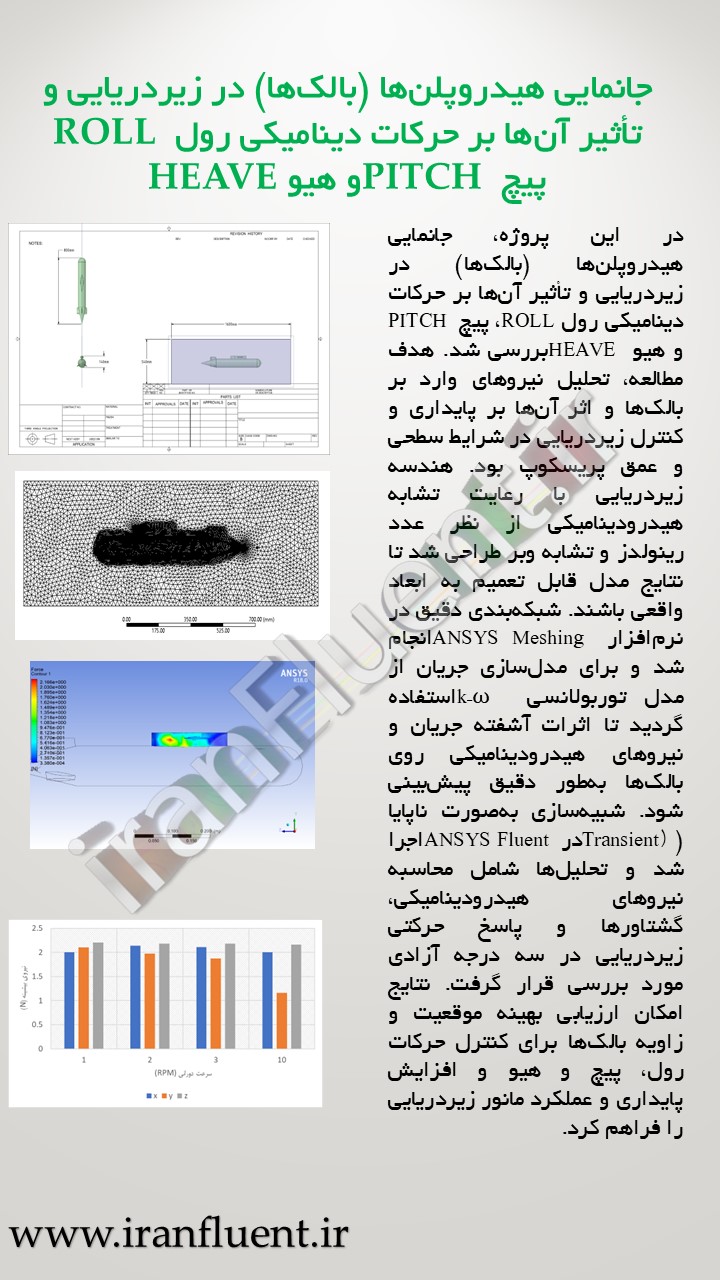
در این پروژه، تأثیر جانمایی و زاویه هیدروپلنها (بالکها) بر رفتار دینامیکی یک زیردریایی مورد بررسی عددی قرار گرفته است. هدف اصلی مطالعه، تحلیل نیروها و گشتاورهای هیدرودینامیکی ایجادشده توسط بالکها و بررسی اثر آنها بر حرکات رول (Roll)، پیچ (Pitch) و هیو (Heave) در شرایط سطحی و عمق پریسکوپ است. نتایج این تحلیل میتواند در بهبود طراحی، پایداری و مانورپذیری زیردریایی در شرایط عملیاتی مؤثر باشد.
هندسه و شرایط مرزی
-
هندسه زیردریایی براساس تشابه هیدرودینامیکی و رعایت عدد رینولدز و عدد وبر طراحی شده است تا نتایج مدل عددی قابلیت تعمیم به ابعاد واقعی را داشته باشد.
-
دامنه محاسباتی شامل حجم آب پیرامون زیردریایی همراه با بالکهای جانبی و سکانهای کنترلی است.
-
شرایط مرزی تعریفشده:
-
ورودی جریان با سرعت یکنواخت
-
خروجی با فشار مرجع
-
بدنه و بالکها با شرط بدون لغزش (No-Slip)
-
سطح آزاد (در حالت سطحی) با اعمال مدل مناسب برای شبیهسازی تداخل آب و هوا
-
شبکهبندی
-
شبکهسازی سهبعدی در ANSYS Meshing انجام شد.
-
برای افزایش دقت پیشبینی نیروهای هیدرودینامیکی، در اطراف لبه بالکها و سکانها ریزشبکه در نظر گرفته شد.
-
لایهبندی نزدیک دیواره با توجه به مقدار مناسب y+ ایجاد شد تا رفتار لایه مرزی و جدایش جریان بهدرستی ثبت گردد.
مدل فیزیکی و معادلات حاکم
-
جریان اطراف زیردریایی با استفاده از مدل توربولانسی k–ω شبیهسازی شده است، که دقت بالایی در پیشبینی پدیدههای لایه مرزی، جدایش جریان و نیروهای آیرودینامیکی/هیدرودینامیکی دارد.
-
معادلات اصلی شامل معادلات پیوستگی و تکانه برای جریان سهبعدی و آشفته است.
-
برای بررسی پاسخ دینامیکی زیردریایی، حرکت آن در سه درجه آزادی Roll، Pitch و Heave لحاظ شده است.
حل عددی و تنظیمات سالور
-
شبیهسازی بهصورت ناپایا (Transient) در نرمافزار ANSYS Fluent اجرا شده تا تغییرات زمانی نیروها و واکنش بدنه قابل بررسی باشد.
-
حلگر فشار–مبنا با گسستهسازی مناسب جریان آشفته استفاده شده است.
-
گام زمانی کوچک برای ثبت دقیق رفتار گذرای نیروها، گشتاورها و تغییرات زاویهای انتخاب شد.
نتایج و تحلیل
-
محاسبه نیروهای هیدرودینامیکی روی بالکها نشان داد که موقعیت و زاویه نصب بالکها تأثیر مستقیم بر ایجاد گشتاورهای کنترلی و پایداری زیردریایی دارد.
-
در شرایط سطحی، وجود سطح آزاد باعث تغییر الگوی جریان و افزایش حساسیت حرکت Pitch شده است.
-
در عمق پریسکوپ، رفتار جریان پایدارتر بوده و بالکها نقش مؤثرتری در کنترل حرکات Roll و Heave داشتهاند.
-
تحلیل سه درجه آزادی امکان مشاهده رفتار واقعی دینامیکی زیردریایی را فراهم کرد و نشان داد که جانمایی بهینه بالکها میتواند:
-
میزان نوسانهای Pitch را کاهش دهد
-
پایداری Roll را افزایش دهد
-
کنترل عمقی (Heave) را پایدارتر کند
-
جمعبندی
این مطالعه نشان داد که طراحی صحیح هیدروپلنها نقش کلیدی در پایداری حرکتی زیردریایی دارد. شبیهسازی ناپایا همراه با مدل توربولانسی k–ω و در نظر گرفتن سه درجه آزادی، امکان ارزیابی دقیق تأثیر جانمایی بالکها بر رفتار دینامیکی را فراهم کرده و میتواند در طراحی بهینه سیستمهای کنترلی زیردریایی مورد استفاده قرار گیرد.